─Ż║²┐žųŲ╩Ūę╗ŅÉæ¬ė├─Ż║²╝»║Ž└ĒšōĄ─┐žųŲĘĮĘ©ĪŻ─Ż║²┐žųŲĄ─ėąą¦ąį┐╔Å─ā╔éĆĘĮ├µüĒ┐╝ æ]ĪŻ ę╗ĘĮ├µŻ¼─Ż║²┐žųŲ╠ß╣®ę╗ĘNīŹ¼F(xi©żn)╗∙ė┌ų¬ūR(╗∙ė┌ęÄ(gu©®)ät)Ą─╔§ų┴šZčį├Ķ╩÷Ą─┐žųŲęÄ(gu©®)┬╔Ą─ą┬ÖC└ĒĪŻ
┴Ēę╗ĘĮ├µŻ¼─Ż║²┐žųŲ╠ß╣®┴╦ę╗ĘNĖ─▀MĘŪŠĆąį┐žųŲŲ„Ą─╠µ┤·ĘĮĘ©Ż¼▀@ą®ĘŪŠĆąį┐žųŲŲ„ ę╗░Ńė├ė┌┐žųŲ║¼ėą▓╗┤_Č©ąį║═ļyęįė├é„Įy(t©»ng)ĘŪŠĆąį┐žųŲ└Ēšō╠Ä└ĒĄ─čbų├ĪŻ
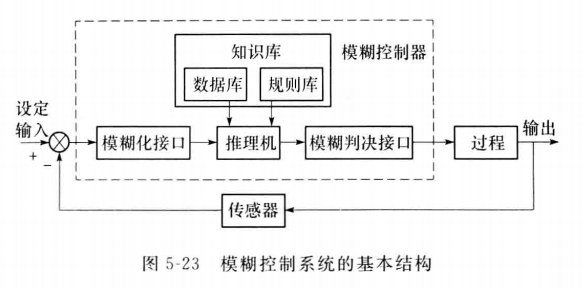
─Ż║²┐žųŲŽĄĮy(t©»ng)Ą─╗∙▒ŠĮYśŗ╚ńłD5-23╦∙╩ŠĪŻŲõųąŻ¼─Ż║²┐žųŲŲ„ė╔─Ż║²╗»Įė┐┌Īóų¬ūRÄņĪó ═Ų└ĒÖC║═─Ż║²┼ąøQĮė┐┌4éĆ╗∙▒Šå╬į¬ĮM│╔ĪŻ
(1)─Ż║²╗»Įė┐┌
£y┴┐▌ö╚ļūā┴┐(įOČ©▌ö╚ļ)║═╩▄┐žŽĄĮy(t©»ng)Ą─▌ö│÷ūā┴┐Ż¼▓ó░č╦³éāė│╔õĄĮę╗éĆ║Ž▀mĄ─Ēæ欚ō ė“Ą─┴┐│╠Ż¼╚╗║¾Ż¼£╩┤_Ąž▌ö╚ļöĄ(sh©┤)ō■▒╗ūāōQ×ķ▀m«ö?sh©┤)─šZčįųĄ╗“─Ż║²╝»║ŽĄ─ś╦ūRĘ¹ĪŻ▒Šå╬į¬┐╔ ęĢ×ķ─Ż║²╝»║ŽĄ─ś╦ėøĪŻ
(2)ų¬ūRÄņ
╔µ╝░æ¬ė├ŅIė“║═┐žųŲ─┐ś╦Ą─ŽÓĻPų¬ūRŻ¼╦³ė╔öĄ(sh©┤)ō■Äņ║═šZčį(─Ż║²)┐žųŲęÄ(gu©®)ätÄņĮM│╔Ż¼öĄ(sh©┤) ō■Äņ×ķšZčį┐žųŲęÄ(gu©®)ätĄ─šōė“ļx╔ó╗»║═ļ`ī┘║»öĄ(sh©┤)╠ß╣®▒žę¬Ą─Č©┴xĪóšZčį┐žųŲęÄ(gu©®)ätś╦ėø┐žųŲ─┐ ś╦║═ŅIė“īŻ╝ęĄ─┐žųŲ▓▀┬įĪŻ
(3)═Ų└ĒÖC
═Ų└ĒÖC╩Ū─Ż║²┐žųŲŽĄĮy(t©»ng)Ą─║╦ą─Ż¼ęį─Ż║²Ė┼─Ņ×ķ╗∙ĄAŻ¼─Ż║²┐žųŲą┼Žó┐╔═©▀^─Ż║²╠N║Ł║═ ─Ż║²▀ē▌ŗĄ─═Ų└ĒęÄ(gu©®)ätüĒ½@╚ĪŻ¼▓ó┐╔īŹ¼F(xi©żn)öM╚╦øQ▓▀▀^│╠Ż¼Ė∙ō■─Ż║²▌ö╚ļ║═─Ż║²┐žųŲęÄ(gu©®)ätĪó─Ż ║²═Ų└ĒŪ¾ĮŌ─Ż║²ĻPŽĄĘĮ│╠Ż¼½@Ą├─Ż║²▌ö│÷ĪŻ
(4)─Ż║²┼ąøQĮė┐┌
ŲĄĮ─Ż║²┐žųŲĄ─═ŲöÓū„ė├Ż¼▓ó«a╔·ę╗éĆ£╩┤_Ą─╗“ĘŪ─Ż║²Ą─┐žųŲū„ė├Ż╗┤╦£╩┤_┐žųŲū„ė├▒ž ĒÜ▀Mąą─µČ©ś╦(▌ö│÷Č©ś╦),▀@ę╗ū„ė├╩Ūį┌ī”╩▄┐ž▀^│╠▀Mąą┐žųŲų«Ū░═©▀^┴┐│╠ūāōQüĒīŹ¼F(xi©żn)Ą─ĪŻ
ę╗éĆĄõą═Ą─║═ÅVĘ║æ¬ė├Ą─╗∙ė┌ų¬ūRĄ─┐žųŲŽĄĮy(t©»ng)░³║¼ų¬ūRÄņĪó═Ų└ĒÖCĪó┐žųŲęÄ(gu©®)ät╝»║═/╗“┐žųŲ╦ŃĘ©Ą╚;═Ų└ĒÖCė├ė┌ėøæø╦∙▓╔ė├Ą─ęÄ(gu©®)ät║═┐žųŲ▓▀┬į,Ė∙ō■ų¬ūR▀Mąą═Ų└ĒŻ¼╦č╦„▓óī¦│÷ĮYšō
▀fļAųŪ─▄┐žųŲ╩Ū░┤ššŠ½Č╚ļSųŪ─▄ĮĄĄ═Č°╠ßĖ▀Ą─įŁ└Ē(IPDI) Ęų╝ēĘų▓╝Ą─,ė╔╚²éĆ╗∙▒Š┐žųŲ╝ēśŗ│╔Ą─,ŽĄĮy(t©»ng)Ą─▌ö│÷╩Ū═©▀^ę╗ĮM╩®ė┌“īäėŲ„Ą─Š▀¾wųĖ┴ŅüĒīŹ¼F(xi©żn)Ą─
└ū▓«╠ž-┐╦└ūĖ±╬╗ų├/┴”╗ņ║Ž┐žųŲŲ„×ķR-C ┐žųŲŲ„,P(q) ×ķÖCąĄ╩ų▀\äėīWĘĮ│╠Ż╗T ×ķ┴”ūāōQŠžĻć; ▓┘ū„┐šķg┴”║═╬╗ų├╗ņ║Ž┐žųŲŽĄĮy(t©»ng),─®Č╦╣żŠ▀Ą─äėæB(t©żi)ąį─▄īóų▒Įėė░Ēæ▓┘ū„┘|┴┐
├┐éĆĻP╣Ø(ji©”)╦∙ąĶꬥ─┴”╗“┴”Šž T, ╩Ūė╔╬ÕéĆ▓┐ĘųĮM│╔Ą─,Ą┌ę╗ĒŚ▒Ē╩Š╦∙ėąĻP╣Ø(ji©”)æT┴┐Ą─ū„ė├,Ė„éĆ ĻP╣Ø(ji©”)Ą─æT┴┐▒╗╝»ųąį┌ę╗Ų,┤µį┌ėąĻP╣Ø(ji©”)ķg±Ņ║ŽæT┴┐Ą─ū„ė├,Ą┌╚²ĒŚ║═Ą┌╦─ĒŚĘųäe▒Ē╩ŠŽ“ą─┴”║═Ėń╩Ž┴”Ą─ū„ė├
ėąéĆ╣ŌīWŠÄ┤aŲ„Ż¼ęį▒Ń┼c£y╦┘░l(f©Ī)ļŖÖCę╗ŲĮM│╔╬╗ų├║═╦┘Č╚Ę┤ü,╩Ūę╗ĘNČ©╬╗čbų├Ż¼╦³Ą─├┐éĆĻP╣Ø(ji©”)Č╝ėąę╗éĆ╬╗ų├┐žųŲŽĄĮy(t©»ng);ī”ÖCŲ„╚╦Ą─ĻP╣Ø(ji©”)ū°ś╦³cų³c▀MąąČ©╬╗┐žųŲ
ÖCŲ„╚╦╬╗ų├┐žųŲėąĢrę▓ĘQ╬╗ū╦┐žųŲ╗“▄ē█E┐žųŲ,ų„ę¬ėąā╔ĘNÖCŲ„╚╦Ą─╬╗ų├┐žųŲĮYśŗą╬╩ĮŻ¼╝┤ĻP╣Ø(ji©”)┐šķg┐žųŲĮYśŗ║═ų▒ĮŪū°ś╦┐šķg┐žųŲĮYśŗ;ÖCŲ„╚╦Ą─╦┼Ę■┐žųŲĮYśŗėą╝»ųą┐žųŲĪóĘų╔ó┐žųŲ║═▀fļA┐žųŲĄ╚
ę║ē║é„äėÖCŲ„╚╦Š▀ėąĮYśŗ║åå╬ĪóÖCąĄÅŖČ╚Ė▀║═╦┘Č╚┐ņĄ╚ā×(y©Łu)³c;ę╗░Ń▓╔ė├ę║ē║╦┼Ę■┐žųŲķy║═─ŻöMĘųĮŌŲ„īŹ¼F(xi©żn)┐žųŲ║═Ę┤ü,╩Ī╚źųąķgäė┴”£p╦┘Ų„Ż¼Å─Č°Ž¹│²┴╦²XŽČ║═─źōpå¢Ņ}
ÖCŲ„╚╦┐žųŲŲ„Š▀ėąČÓĘNĮYśŗą╬╩Į,░³└©ĘŪ╦┼Ę■┐žųŲĪó╦┼Ę■┐žųŲĪó╬╗ų├║═╦┘Č╚Ę┤ü┐žųŲĪó┴”(┴”Šž)┐žųŲĪó╗∙ė┌é„ĖąŲ„Ą─┐žųŲĪóĘŪŠĆąį┐žųŲĪóĘųĮŌ╝ė╦┘Č╚┐žųŲĪó╗¼─Ż┐žųŲĪóūŅā×(y©Łu) ┐žųŲĪóūį▀mæ¬┐žųŲĪó▀fļA┐žųŲęį╝░Ė„ĘNųŪ─▄┐žųŲĄ╚
ļŖÖC┼c£p╦┘Ų„╩Ūśŗ│╔ÖCŲ„╚╦ĻP╣Ø(ji©”)“īäėŽĄĮy(t©»ng)Ą─║╦ą─ÖCļŖĮM╝■;é„ĖąŲ„┼cĖąų¬─ŻĮMė├ė┌īŹĢr½@╚ĪÖCŲ„╚╦ūį╔ĒĀŅæB(t©żi)╝░┼cŁh(hu©ón)Š│Į╗╗źą┼ŽóĄ─Ėąų¬å╬į¬;ÖCŲ„╚╦┤¾─XŽĄĮy(t©»ng)žōž¤Ėąų¬║═ęÄ(gu©®)äØøQ▓▀
ŅlūVłDĘ©īóšZ궹┼╠¢Ą─ŅlūVčžų°Ģrķg▌S╝ėęįš╣ķ_,ūRäeŠ½Č╚ę╗░Ń;LPCĘ©╩Ūī”šZ궹┼╠¢│ķ╚ĪLPCŽĄöĄ(sh©┤);ļ[▓ž╩Į±R┐╔Ę“─Ż╩Įė├ė┌ĘŪ╠žČ©╚╦Ą─šZę¶ūRäe,Į©┴óšZ궥─ĀŅæB(t©żi)▐DęŲ─Ż╩Į
ÖCŲ„╚╦═©▀^özŽ±Ņ^▀@ą®═ŌįO½@Ą├łDŽ±ų«║¾,└¹ė├─│ĘN╦ŃĘ©üĒ▀MąąłDŽ±ų«ķgĄ─ūāōQ,ī”łDŽ±▀MąąĖ„ĘN▓┘ū„ęį▀_ĄĮ╦∙ąĶę¬īŹ¼F(xi©żn)Ą─╣”─▄;³c▀\╦ŃĖ─╔ŲłDŽ±Ą─’@╩Šą¦╣¹
ė╔łDŽ±▓╔╝»ŽĄĮy(t©»ng),łDŽ±╠Ä└ĒŽĄĮy(t©»ng)╝░ą┼ŽóŠC║ŽĘų╬÷╠Ä└ĒŽĄĮy(t©»ng)śŗ│╔;ÖCŲ„╚╦Ą─ęĢėXŻ¼┤¾Ė┼┐╔ęį└ĒĮŌ×ķĪ░ęĢĪ▒║═Ī░ėXĪ▒ ā╔▓┐Ęų;ŽĄĮy(t©»ng)ų„ę¬ė╔łDŽ±▓╔╝»▓┐╝■ĪółDŽ±Ą─╠Ä└Ē║═Ęų╬÷Īó╠Ä└ĒĮY╣¹▌ö│÷čbų├






