| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
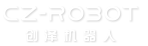
ÖCŲ„╚╦Ą─įSČÓū„śI╩Ū┐žųŲÖCąĄ╩ų─®Č╦╣żŠ▀Ą─╬╗ų├║═ū╦æBŻ¼ęįīŹ¼F³cĄĮ³cĄ─┐žųŲ(PTP ┐žųŲŻ¼╚ń░ß▀\Īó³c║ĖÖCŲ„╚╦)╗“▀B└m┬ĘÅĮĄ─┐žųŲ(CP ┐žųŲŻ¼╚ń╗Ī║ĖĪóćŖŲßÖCŲ„╚╦)ĪŻę“┤╦īŹ ¼FÖCŲ„╚╦Ą─╬╗ų├┐žųŲ╩ŪÖCŲ„╚╦Ą─Z╗∙▒ŠĄ─┐žųŲ╚╬äšĪŻÖCŲ„╚╦╬╗ų├┐žųŲėąĢrę▓ĘQ╬╗ū╦┐žųŲ╗“▄ē█E┐žųŲĪŻī”ė┌ėąą®ū„śIŻ¼╚ńčb┼õĪóčą─źĄ╚Ż¼ų╗ėą╬╗ų├┐žųŲ╩Ū▓╗ē“Ą─Ż¼▀ĆąĶę¬┴”┐žųŲĪŻ ų„ę¬ėąā╔ĘNÖCŲ„╚╦Ą─╬╗ų├┐žųŲĮYśŗą╬╩ĮŻ¼╝┤ĻP╣Ø┐šķg┐žųŲĮYśŗ║═ų▒ĮŪū°ś╦┐šķg┐žųŲĮY śŗŻ¼ĘųäeęŖłD5-9a ║═łD5-9b ╦∙╩ŠĪŻ
į┌łD5-9a ųą Ż¼q=[qa1,qu2,ĪŁ,qun] ╩ŪŲ┌═¹Ą─ĻP╣Ø╬╗ų├╩Ė┴┐Ż¼ q ║═qĪŻ╩ŪŲ┌═¹Ą─ĻP ╣Ø╦┘Č╚╩Ė┴┐║═╝ė╦┘Č╚╩Ė┴┐Ż¼ q ║═q ╩ŪīŹļHĄ─ĻP╣Ø╬╗ų├╩Ė┴┐║═╦┘Č╚╩Ė┴┐ĪŻ t=[ti,T2, ĪŁ , T]T ╩ŪĻP╣Ø“īäė┴”Šž╩Ė┴┐Ż¼ U₁ ║═U₂ ╩ŪŽÓæ¬Ą─┐žųŲ╩Ė┴┐ĪŻ
į┌łD5-9b ųą Ż¼wu=[pl,”šI] ╩ŪŲ┌═¹Ą─╣żŠ▀╬╗ū╦Ż¼Ųõųąp=[xd,ya,zu] ▒Ē╩ŠŲ┌═¹ Ą─╣żŠ▀╬╗ų├Ż¼ qu ▒Ē╩ŠŲ┌═¹Ą─╣żŠ▀ū╦æBĪŻ w=[v,wJ], Ųõ ųą va=[v,V4,v] ╩ŪŲ┌ ═¹Ą─╣żŠ▀ŠĆ╦┘Č╚Ż¼ w=[wa,,wa,wd] ╩ŪŲ┌═¹Ą─╣żŠ▀ĮŪ╦┘Č╚Ż¼ wa ╩ŪŲ┌═¹Ą─╣żŠ▀╝ė╦┘Č╚Ż¼ w ║═w ▒Ē╩ŠīŹļHĄ─╣żŠ▀╬╗ū╦║═╣żŠ▀╦┘Č╚ĪŻ▀\ąąųąĄ─╣żśIÖCŲ„╚╦ę╗░Ń▓╔ė├łD5-9a ╦∙╩Š┐žųŲĮY śŗĪŻįō┐žųŲĮYśŗĄ─Ų┌═¹▄ē█E╩ŪĻP╣ØĄ─╬╗ų├Īó╦┘Č╚║═╝ė╦┘Č╚Ż¼ę“Č°ęūė┌īŹ¼FĻP╣ØĄ─╦┼Ę■┐ž ųŲĪŻ▀@ĘN┐žųŲĮYśŗĄ─ų„ę¬å¢Ņ}╩ŪŻ║ė╔ė┌═∙═∙ę¬Ū¾Ą─╩Ūį┌ų▒ĮŪū°ś╦┐šķgĄ─ÖCąĄ╩ų─®Č╦▀\äė▄ē █EŻ¼ę“Č°×ķ┴╦īŹ¼F▄ē█EĖ·█ÖŻ¼ąĶīóÖCąĄ╩ų─®Č╦Ą─Ų┌═¹▄ē█EĮø─µ▀\äėīWėŗ╦ŃūāōQ×ķį┌ĻP╣Ø┐š ķg▒Ē╩ŠĄ─Ų┌═¹▄ē█EĪŻ
ÖCŲ„╚╦Ą─╦┼Ę■┐žųŲĮYśŗ
ÖCŲ„╚╦┐žųŲŲ„ę╗░ŃŠ∙ė╔ėŗ╦ŃÖCüĒīŹ¼FĪŻėŗ╦ŃÖCĄ─┐žųŲĮYśŗŠ▀ėąČÓĘNą╬╩ĮŻ¼│ŻęŖĄ─ėą╝»ųą┐žųŲĪóĘų╔ó┐žųŲ║═▀fļA┐žųŲĄ╚ĪŻłD5-10▒Ē╩Š PUMA ÖCŲ„╚╦ā╔J▀fļA┐žųŲĄ─ĮYśŗłDĪŻ
ÖCŲ„╚╦┐žųŲŽĄĮy╩ŪęįÖCŲ„╚╦ū„×ķ┐žųŲī”Ž¾Ą─Ż¼╦³Ą─įOėŗĘĮĘ©╝░ģóöĄ▀xō±Ż¼╚į┐╔ģóššę╗ ░Ńėŗ╦ŃÖC┐žųŲŽĄĮyĪŻ▓╗▀^Ż¼ė├Ą├▌^ČÓĄ─╚į╩Ū▀B└mŽĄĮyĄ─įOėŗĘĮĘ©Ż¼╝┤Ž╚░čÖCŲ„╚╦┐žųŲŽĄ Įy«öū„▀B└mŽĄĮy▀MąąįOėŗŻ¼╚╗║¾īóįOėŗ║├Ą─┐žųŲęÄ┬╔ļx╔ó╗»Ż¼Z║¾ė╔ėŗ╦ŃÖCüĒ╝ėęįīŹ¼FĪŻ ī”ė┌ėąą®įOėŗĘĮĘ©(╚ń▓╔ė├ūįąŻš²┐žųŲĄ─įOėŗĘĮĘ©),ät▓╔ė├ų▒Įėļx╔ó╗»Ą─įOėŗĘĮĘ©Ż¼╝┤ Ž╚īóÖCŲ„╚╦┐žųŲī”Ž¾─Żą═ļx╔ó╗»Ż¼╚╗║¾ų▒ĮėįOėŗ│÷ļx╔óĄ─┐žųŲŲ„Ż¼į┘ė╔ėŗ╦ŃÖCīŹ¼FĪŻ
¼FėąĄ─╣żśIÖCŲ„╚╦┤¾ČÓ▓╔ė├d┴óĻP╣ØĄ─PID ┐žųŲĪŻłD5-10╦∙╩Š PUMA ÖCŲ„╚╦Ą─┐žųŲ ĮYśŗ╝┤×ķę╗Ąõą═ĪŻ╚╗Č°Ż¼ė╔ė┌d┴óĻP╣ØPID ┐žųŲ╬┤┐╝æ]▒╗┐žī”Ž¾(ÖCŲ„╚╦)Ą─ĘŪŠĆąį╝░ĻP╣ØķgĄ─±Ņ║Žū„ė├Ż¼ę“Č°┐žųŲŠ½Č╚║═╦┘Č╚Ą─╠ßĖ▀╩▄ĄĮŽ▐ųŲĪŻ│²┴╦▒Š╣ØĮķĮBĄ─d┴óĻP╣Ø PID ┐žųŲ ═ŌŻ¼▀Ćīóį┌║¾└mĖ„╣Øėæšōę╗ą®ą┬Ą─┐žųŲĘĮĘ©ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


