īŻ╝ę┐žųŲŽĄĮy(t©»ng)╩Ūę╗éĆæ¬(y©®ng)ė├īŻ╝ꎥĮy(t©»ng)╝╝ąg(sh©┤)Ą─┐žųŲŽĄĮy(t©»ng)Ż¼ę▓╩Ūę╗éĆĄõą═Ą─║═ÅVĘ║æ¬(y©®ng)ė├Ą─╗∙ė┌ų¬ūRĄ─┐žųŲŽĄĮy(t©»ng)ĪŻ
īŻ╝ę┐žųŲŽĄĮy(t©»ng)ę“æ¬(y©®ng)ė├ł÷║Ž║═┐žųŲę¬Ū¾▓╗═¼Ż¼ŲõĮY(ji©”)śŗ(g©░u)ę▓┐╔─▄▓╗ę╗śėĪŻ╚╗Č°Ż¼Äū║§╦∙ėąĄ─ īŻ╝ę┐žųŲŽĄĮy(t©»ng)(┐žųŲŲ„)Č╝░³║¼ų¬ūRÄņĪó═Ų└ĒÖC(j©®)Īó┐žųŲęÄ(gu©®)ät╝»║═/╗“┐žųŲ╦ŃĘ©Ą╚ĪŻ
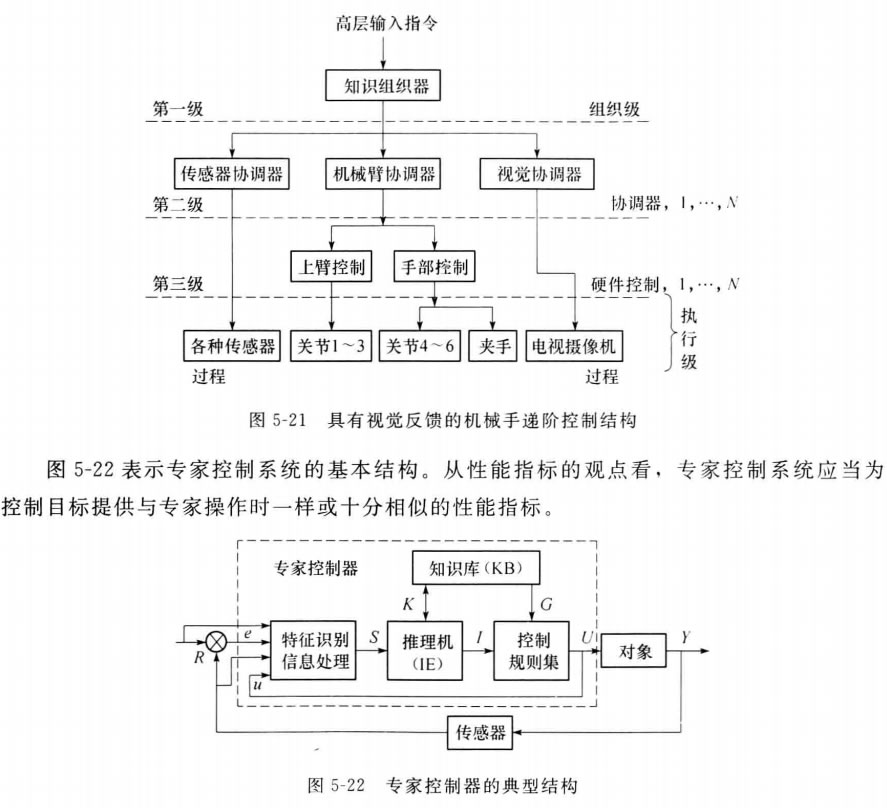
▒ŠīŻ╝ę┐žųŲŽĄĮy(t©»ng)×ķ ę╗ ╣żśI(y©©)īŻ╝ę┐žųŲŲ„(EC), ╦³ ė╔ ų¬ ūR Äņ Īó ═Ų └Ē ÖC(j©®) Īó ┐ž ųŲ ęÄ(gu©®) ät ╝» ║═ ╠ž š„ūRäeą┼Žó╠Ä└ĒĄ╚å╬į¬ĮM│╔ĪŻų¬ūRÄņė├ė┌┤µĘ┼╣żśI(y©©)▀^│╠┐žųŲĄ─ŅI(l©½ng)ė“ų¬ūRŻ╗═Ų└ĒÖC(j©®)ė├ė┌ėøæø╦∙▓╔ė├Ą─ęÄ(gu©®)ät║═┐žųŲ▓▀┬įŻ¼╩╣š¹éĆŽĄĮy(t©»ng)ģf(xi©”)š{(di©żo)Ąž╣żū„Ż╗═Ų└ĒÖC(j©®)─▄ē“Ė∙ō■(j©┤)ų¬ūR▀M(j©¼n)ąą═Ų└ĒŻ¼╦č╦„▓óī¦(d©Żo)│÷ĮY(ji©”)šōĪŻ
╠žš„ūRäe┼cą┼Žó╠Ä└Ēå╬į¬Ą─ū„ė├╩ŪīŹ¼F(xi©żn)ī”ą┼ŽóĄ─╠ß╚Ī┼c╝ė╣żŻ¼×ķ┐žųŲøQ▓▀║═īW(xu©”)┴Ģ(x©¬)▀mæ¬(y©®ng)╠ß ╣®ę└ō■(j©┤)ĪŻ╦³ų„ę¬░³└©│ķ╚ĪäėæB(t©żi)▀^│╠Ą─╠žš„ą┼ŽóŻ¼ūRäeŽĄĮy(t©»ng)Ą─╠žš„ĀŅæB(t©żi)Ż¼▓óī”╠žš„ą┼Žóū÷▒žę¬ Ą─╝ė╣żĪŻ
EC Ą─ ▌ö ╚ļ ╝» ×ķE=(R,e,Y,U),S ×ķ ╠ž š„ ą┼ Žó ▌ö │÷ ╝» Ż¼K ×ķ Įø(j©®ng) “× ų¬ ūR ╝» Ż¼G ×ķ ęÄ(gu©®)
ät ą▐ Ė─ ├³ ┴Ņ Ż¼I ×ķ═Ų└ĒÖC(j©®)śŗ(g©░u)▌ö│÷╝»Ż¼ U ×ķ EC Ą─ ▌ö │÷ ╝» ĪŻ
EC Ą──Żą═┐╔ė├Ž┬╩Į▒Ē╩ŠŻ║
U=f(E,K,I) (5.85)
ųŪ ─▄ ╦Ń ūėf ×ķÄūéĆ╦ŃūėĄ─Å═(f©┤)║Ž▀\(y©┤n)╦ŃŻ║
f=gĪżhĪżp
Ųõ ųą Ż¼g:EĪ·S;h:SĪ┴KĪ·I;p:IĪ┴GĪ·UĪŻ
gĪóhĪóp Š∙×ķųŪ─▄╦ŃūėŻ¼Ųõą╬╩Į×ķŻ║
IF A THEN B (5.86)
Ųõ ųą Ż¼A ×ķŪ░╠ߌl╝■Ż¼ B ×ķĮY(ji©”)šōĪŻ A ┼c B ų«ķgĄ─ĻP(gu©Īn)ŽĄ┐╔ęį░³└©ĮŌ╬÷▒Ē▀_(d©ó)╩ĮĪó─Ż║²ĻP(gu©Īn)ŽĄĪóę“ ╣¹ĻP(gu©Īn)ŽĄ║═Įø(j©®ng)“×ęÄ(gu©®)ätĄ╚ČÓĘNą╬╩ĮĪŻ B ▀Ć┐╔ęį╩Ūę╗éĆūėęÄ(gu©®)ät╝»ĪŻ
▀fļAųŪ─▄┐žųŲ╩Ū░┤ššŠ½Č╚ļSųŪ─▄ĮĄĄ═Č°╠ßĖ▀Ą─įŁ└Ē(IPDI) Ęų╝ēĘų▓╝Ą─,ė╔╚²éĆ╗∙▒Š┐žųŲ╝ēśŗ(g©░u)│╔Ą─,ŽĄĮy(t©»ng)Ą─▌ö│÷╩Ū═©▀^ę╗ĮM╩®ė┌“ī(q©▒)äėŲ„Ą─Š▀¾wųĖ┴ŅüĒīŹ¼F(xi©żn)Ą─
└ū▓«╠ž-┐╦└ūĖ±╬╗ų├/┴”╗ņ║Ž┐žųŲŲ„×ķR-C ┐žųŲŲ„,P(q) ×ķÖC(j©®)ąĄ╩ų▀\(y©┤n)äėīW(xu©”)ĘĮ│╠Ż╗T ×ķ┴”ūāōQŠžĻć; ▓┘ū„┐šķg┴”║═╬╗ų├╗ņ║Ž┐žųŲŽĄĮy(t©»ng),─®Č╦╣żŠ▀Ą─äėæB(t©żi)ąį─▄īóų▒Įėė░Ēæ▓┘ū„┘|(zh©¼)┴┐
├┐éĆĻP(gu©Īn)╣Ø(ji©”)╦∙ąĶꬥ─┴”╗“┴”Šž T, ╩Ūė╔╬ÕéĆ▓┐ĘųĮM│╔Ą─,Ą┌ę╗ĒŚ▒Ē╩Š╦∙ėąĻP(gu©Īn)╣Ø(ji©”)æT┴┐Ą─ū„ė├,Ė„éĆ ĻP(gu©Īn)╣Ø(ji©”)Ą─æT┴┐▒╗╝»ųąį┌ę╗Ų,┤µį┌ėąĻP(gu©Īn)╣Ø(ji©”)ķg±Ņ║ŽæT┴┐Ą─ū„ė├,Ą┌╚²ĒŚ║═Ą┌╦─ĒŚĘųäe▒Ē╩ŠŽ“ą─┴”║═Ėń╩Ž┴”Ą─ū„ė├
ėąéĆ╣ŌīW(xu©”)ŠÄ┤aŲ„Ż¼ęį▒Ń┼c£y╦┘░l(f©Ī)ļŖÖC(j©®)ę╗ŲĮM│╔╬╗ų├║═╦┘Č╚Ę┤ü,╩Ūę╗ĘNČ©╬╗čbų├Ż¼╦³Ą─├┐éĆĻP(gu©Īn)╣Ø(ji©”)Č╝ėąę╗éĆ╬╗ų├┐žųŲŽĄĮy(t©»ng);ī”ÖC(j©®)Ų„╚╦Ą─ĻP(gu©Īn)╣Ø(ji©”)ū°ś╦(bi©Īo)³c(di©Żn)ų³c(di©Żn)▀M(j©¼n)ąąČ©╬╗┐žųŲ
ÖC(j©®)Ų„╚╦╬╗ų├┐žųŲėąĢrę▓ĘQ╬╗ū╦┐žųŲ╗“▄ē█E┐žųŲ,ų„ę¬ėąā╔ĘNÖC(j©®)Ų„╚╦Ą─╬╗ų├┐žųŲĮY(ji©”)śŗ(g©░u)ą╬╩ĮŻ¼╝┤ĻP(gu©Īn)╣Ø(ji©”)┐šķg┐žųŲĮY(ji©”)śŗ(g©░u)║═ų▒ĮŪū°ś╦(bi©Īo)┐šķg┐žųŲĮY(ji©”)śŗ(g©░u);ÖC(j©®)Ų„╚╦Ą─╦┼Ę■┐žųŲĮY(ji©”)śŗ(g©░u)ėą╝»ųą┐žųŲĪóĘų╔ó┐žųŲ║═▀fļA┐žųŲĄ╚
ę║ē║é„äėÖC(j©®)Ų„╚╦Š▀ėąĮY(ji©”)śŗ(g©░u)║åå╬ĪóÖC(j©®)ąĄÅŖ(qi©óng)Č╚Ė▀║═╦┘Č╚┐ņĄ╚ā×(y©Łu)³c(di©Żn);ę╗░Ń▓╔ė├ę║ē║╦┼Ę■┐žųŲķy║═─ŻöMĘųĮŌŲ„īŹ¼F(xi©żn)┐žųŲ║═Ę┤ü,╩Ī╚źųąķgäė┴”£p╦┘Ų„Ż¼Å─Č°Ž¹│²┴╦²XŽČ║═─źōpå¢Ņ}
ÖC(j©®)Ų„╚╦┐žųŲŲ„Š▀ėąČÓĘNĮY(ji©”)śŗ(g©░u)ą╬╩Į,░³└©ĘŪ╦┼Ę■┐žųŲĪó╦┼Ę■┐žųŲĪó╬╗ų├║═╦┘Č╚Ę┤ü┐žųŲĪó┴”(┴”Šž)┐žųŲĪó╗∙ė┌é„ĖąŲ„Ą─┐žųŲĪóĘŪŠĆąį┐žųŲĪóĘųĮŌ╝ė╦┘Č╚┐žųŲĪó╗¼─Ż┐žųŲĪóūŅā×(y©Łu) ┐žųŲĪóūį▀mæ¬(y©®ng)┐žųŲĪó▀fļA┐žųŲęį╝░Ė„ĘNųŪ─▄┐žųŲĄ╚
ļŖÖC(j©®)┼c£p╦┘Ų„╩Ūśŗ(g©░u)│╔ÖC(j©®)Ų„╚╦ĻP(gu©Īn)╣Ø(ji©”)“ī(q©▒)äėŽĄĮy(t©»ng)Ą─║╦ą─ÖC(j©®)ļŖĮM╝■;é„ĖąŲ„┼cĖąų¬─ŻĮMė├ė┌īŹĢr½@╚ĪÖC(j©®)Ų„╚╦ūį╔ĒĀŅæB(t©żi)╝░┼cŁh(hu©ón)Š│Į╗╗źą┼ŽóĄ─Ėąų¬å╬į¬;ÖC(j©®)Ų„╚╦┤¾─XŽĄĮy(t©»ng)žō(f©┤)ž¤(z©”)Ėąų¬║═ęÄ(gu©®)äØøQ▓▀
ŅlūVłDĘ©īóšZ궹┼╠¢Ą─ŅlūVčžų°Ģrķg▌S╝ėęįš╣ķ_,ūRäeŠ½Č╚ę╗░Ń;LPCĘ©╩Ūī”šZ궹┼╠¢│ķ╚ĪLPCŽĄöĄ(sh©┤);ļ[▓ž╩Į±R┐╔Ę“─Ż╩Įė├ė┌ĘŪ╠žČ©╚╦Ą─šZę¶ūRäe,Į©┴óšZ궥─ĀŅæB(t©żi)▐D(zhu©Żn)ęŲ─Ż╩Į
ÖC(j©®)Ų„╚╦═©▀^özŽ±Ņ^▀@ą®═ŌįO(sh©©)½@Ą├łDŽ±ų«║¾,└¹ė├─│ĘN╦ŃĘ©üĒ▀M(j©¼n)ąąłDŽ±ų«ķgĄ─ūāōQ,ī”łDŽ±▀M(j©¼n)ąąĖ„ĘN▓┘ū„ęį▀_(d©ó)ĄĮ╦∙ąĶę¬īŹ¼F(xi©żn)Ą─╣”─▄;³c(di©Żn)▀\(y©┤n)╦ŃĖ─╔ŲłDŽ±Ą─’@╩Šą¦╣¹
ė╔łDŽ±▓╔╝»ŽĄĮy(t©»ng),łDŽ±╠Ä└ĒŽĄĮy(t©»ng)╝░ą┼ŽóŠC║ŽĘų╬÷╠Ä└ĒŽĄĮy(t©»ng)śŗ(g©░u)│╔;ÖC(j©®)Ų„╚╦Ą─ęĢėXŻ¼┤¾Ė┼┐╔ęį└ĒĮŌ×ķĪ░ęĢĪ▒║═Ī░ėXĪ▒ ā╔▓┐Ęų;ŽĄĮy(t©»ng)ų„ę¬ė╔łDŽ±▓╔╝»▓┐╝■ĪółDŽ±Ą─╠Ä└Ē║═Ęų╬÷Īó╠Ä└ĒĮY(ji©”)╣¹▌ö│÷čbų├
╚½ŠųęÄ(gu©®)äØĘĮĘ©ę└ššęč½@╚ĪĄ─Łh(hu©ón)Š│ą┼Žó,ĮoÖC(j©®)Ų„╚╦ęÄ(gu©®)äØ│÷ę╗Śl┬ĘÅĮ,┬ĘÅĮĄ─Š½┤_│╠Č╚╚ĪøQė┌½@╚ĪŁh(hu©ón)Š│ą┼ŽóĄ─£╩(zh©│n)┤_│╠Č╚;Šų▓┐ęÄ(gu©®)äØĘĮĘ©é╚(c©©)ųžė┌┐╝æ]ÖC(j©®)Ų„╚╦«ö(d©Īng)Ū░Ą─Šų▓┐Łh(hu©ón)Š│ą┼Žó