

▀fļA┐žųŲŽĄĮy ė╔╦_└’ĄŽ╦╣║═├Ę╦╣╠žĀ¢(Mystel) Ą╚╚╦╠ß│÷Ą─▀fļAųŪ─▄┐žųŲ╩Ū░┤ššŠ½Č╚ļSųŪ─▄ĮĄĄ═Č°╠ßĖ▀Ą─įŁ└Ē(IPDI) ĘųJĘų▓╝Ą─Ż¼▀@ę╗įŁ└Ē╩Ū▀fļA╣▄└ĒŽĄĮyųą│Żė├Ą─ĪŻ ųŪ─▄┐žųŲŽĄĮy╩Ūė╔╚²éĆ╗∙▒Š┐žųŲJśŗ│╔Ą─Ż¼ŲõJ┬ōĮ╗╗źĮYśŗ╚ńłD5-20╦∙╩ŠĪŻ
łDųąf ×ķūįł╠ąąJų┴ģfš{JĄ─į┌ŠĆĘ┤üą┼╠¢Ż╗ f ×ķūįģfš{Jų┴ĮM┐ŚJĄ─ļxŠĆĘ┤üą┼╠¢Ż╗ C={c₁, C₂,ĪŁ,Cm} ×ķ▌ö╚ļųĖ┴ŅŻ╗ U={u₁,u₂,ĪŁ,um} ×ķĘųŅÉŲ„Ą─▌ö│÷ą┼╠¢Ż¼╝┤ĮM┐ŚŲ„Ą─▌ö╚ļ ą┼╠¢ĪŻ
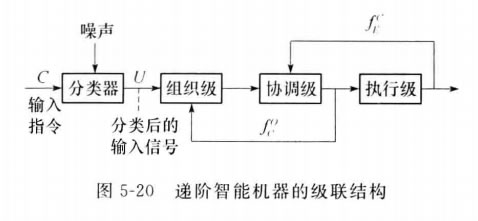
▀fļAųŪ─▄┐žųŲŽĄĮy╩ŪéĆš¹¾wŻ¼╦³░čČ©ąįĄ─ė├æ¶ųĖ┴ŅūāōQ×ķę╗éĆ╬’└Ē▓┘ū„ą“┴ąĪŻŽĄĮyĄ─▌ö│÷╩Ū═©▀^ę╗ĮM╩®ė┌“īäėŲ„Ą─Š▀¾wųĖ┴ŅüĒīŹ¼FĄ─ĪŻŲõųąŻ¼ĮM┐ŚJ┤·▒Ē┐žųŲŽĄĮyĄ─ų„ī¦╦╝ ŽļŻ¼▓óė╔╚╦╣żųŪ─▄Ų┐žųŲū„ė├ĪŻģfš{J╩Ū╔Ž(ĮM┐Ś)J║═Ž┬(ł╠ąą)JķgĄ─Įė┐┌Ż¼│ą╔ŽåóŽ┬Ż¼ ▓óė╔╚╦╣żųŪ─▄║═▀\╗IīW╣▓═¼ū„ė├ĪŻł╠ąąJ╩Ū▀fļA┐žųŲĄ─ĄūīėŻ¼ę¬Ū¾Š▀ėą▌^Ė▀Ą─Š½Č╚║═▌^Ą═ Ą─ųŪ─▄Ż¼╦³░┤┐žųŲšō▀Mąą┐žųŲŻ¼ī”ŽÓĻP▀^│╠ł╠ąą▀m«öĄ─┐žųŲū„ė├ĪŻ
▀fļAųŪ─▄┐žųŲŽĄĮyū±čŁ╠ßĖ▀Š½Č╚Č°ĮĄĄ═ųŪ─▄(IPDI) Ą─įŁ└ĒĪŻĖ┼┬╩─Żą═ė├ė┌▒Ē╩ŠĮM┐ŚJ ═Ų└ĒĪóęÄäØ║═øQ▓▀Ą─▓╗┤_Č©ąįĪóųĖČ©ģfš{JĄ─╚╬äšęį╝░ł╠ąąJĄ─┐žųŲū„ė├ĪŻ▓╔ė├ņžüĒČ╚┴┐ ųŪ─▄ÖCŲ„ł╠ąąĖ„ĘNųĖ┴ŅĄ─ą¦╣¹Ż¼▓ó▓╔ė├ņž▀MąąZā×øQ▓▀ĪŻ
▒ŠĘĮĘ©×ķ╩╣ūįų„ųŪ─▄┐žųŲŽĄĮy▀m欼F┤·╣żśIĪó┐šķg╠Į╦„Īó║╦╠Ä└Ē║═ßtīWĄ╚ŅIė“Ą─ąĶę¬╠ß ╣®┴╦ę╗éĆėąą¦═ŠÅĮĪŻłD5-21▒Ē╩ŠŠ▀ėąęĢėXĘ┤üĄ─PUMA 600ÖCąĄ╩ųĄ─ųŪ─▄ŽĄĮyĘųJĮYśŗłDĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



