

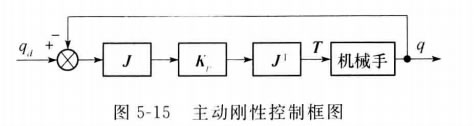
łD5-15╩Š│÷ę╗éĆų„äėäéąį┐žųŲ(active stiffness control)ŽĄĮy┐“łDĪŻłDųąŻ¼J ×ķÖCąĄ╩ų─®Č╦ł╠ąąčbų├Ą─č┼┐╔▒╚ŠžĻćŻ╗K, ×ķČ©┴xė┌─®Č╦Ąč┐©ā║ū°ś╦ŽĄĄ─äéąįī”ĮŪŠžĻćŻ¼Ųõį¬╦žė╔╚╦×ķ┤_Č©ĪŻ╚ń╣¹ŽŻ═¹į┌─│éĆĘĮŽ“╔Žė÷ĄĮīŹļH╝s╩°Ż¼─Ū├┤▀@éĆĘĮŽ“Ą─äéąį欫öĮĄĄ═Ż¼ęį▒ŻūCėą▌^Ą═Ą─ĮYśŗæ¬┴”Ż╗Ę┤ų«Ż¼į┌─│ą®▓╗ŽŻ═¹┼÷ĄĮīŹļH╝s╩°Ą─ĘĮŽ“╔ŽŻ¼ätæ¬╝ė┤¾äéąįŻ¼▀@śė┐╔ ╩╣ÖCąĄ╩ųŠoŠoĖ·ļSŲ┌═¹▄ē█EĪŻė┌╩ŪŻ¼Š═─▄ē“═©▀^Ė─ūāäéąįüĒ▀mæ¬ūā╗»Ą─ū„śIę¬Ū¾ĪŻ
└ū▓«╠ž(MĪżHĪżRaibert) ║═┐╦└ūĖ±(JĪżJĪżCraig) ė┌1981─Ļ▀Mąą┴╦ÖCŲ„╚╦ÖCąĄ╩ų╬╗ų├ ║═┴”╗ņ║Ž┐žųŲĄ─ųžę¬īŹ“ׯ¼▓ó╚ĪĄ├┴╝║├ĮY╣¹ĪŻ║¾üĒŻ¼Š═ĘQ▀@ĘN┐žųŲŲ„×ķR-C ┐žųŲŲ„ĪŻ
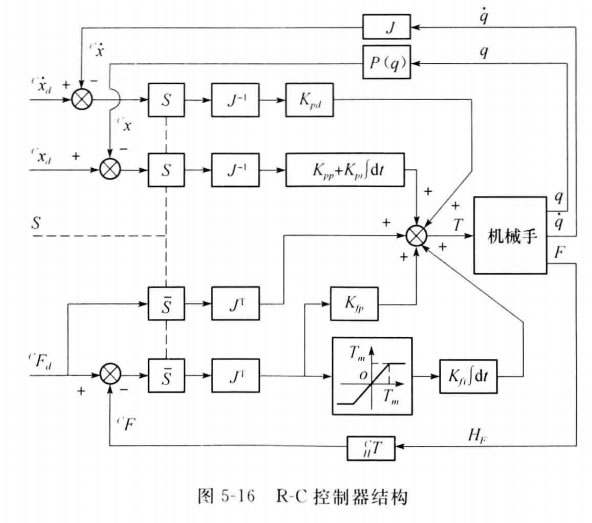
łD5-16▒Ē╩ŠR-C ┐žųŲŲ„Ą─ĮYśŗĪŻłDųąŻ¼S ║═S ×ķ▀mÅ─▀xō±ŠžĻćŻ╗xa ║═Fa ×ķČ©┴xė┌Ąč ┐©ā║ū°ś╦ŽĄĄ─Ų┌═¹╬╗ų├║═┴”Ą─▄ē█EŻ╗P(q) ×ķÖCąĄ╩ų▀\äėīWĘĮ│╠Ż╗T ×ķ┴”ūāōQŠžĻćĪŻ
▀@ĘNR-C ┐žųŲŲ„ø]ėą┐╝æ]ÖCąĄ╩ųäėæB±Ņ║ŽĄ─ė░ĒæŻ¼▀@Š═Ģ■ī¦ų┬ÖCąĄ╩ųį┌╣żū„┐šķg─│ą® ĘŪŲµ«É╬╗ų├╔Ž│÷¼F▓╗ĘĆČ©ĪŻį┌╔Ņ╚ļĘų╬÷ R-C ŽĄĮy╦∙┤µį┌Ą─å¢Ņ}ų«║¾Ż¼┐╔ī”ų«▀Mąą╚ńŽ┬ Ė─▀MŻ║
1)į┌╗ņ║Ž┐žųŲŲ„ųą┐╝æ]ÖCąĄ╩ųĄ─äėæBė░ĒæŻ¼▓óī”ÖCąĄ╩ų╦∙╩▄ųž┴”╝░Ėń╩Ž┴”║═Ž“ą─┴”▀M ąąčaāöĪŻ
2)┐╝æ]┴”┐žųŲŽĄĮyĄ─ŪĘūĶ─ß╠žąįŻ¼į┌┴”┐žųŲ╗ž┬ĘųąŻ¼╝ė╚ļūĶ─ßĘ┤üŻ¼ęįŽ„╚§š±╩Ä ę“╦žĪŻ
Ė─▀M║¾Ą─R-C ┴”/╬╗ų├╗ņ║Ž┐žųŲŽĄĮyĮYśŗłD╚ńłD5-17╦∙╩ŠĪŻłDųąŻ¼M(q) ×ķÖCąĄ╩ųĄ─ æT┴┐ŠžĻć─Żą═ĪŻ
ė╔ė┌ÖCŲ„╚╦ÖCąĄ╩ų╩Ū═©▀^╣żŠ▀▀Mąą▓┘ū„ū„śIĄ─Ż¼╦∙ęįŲõ─®Č╦╣żŠ▀Ą─äėæBąį─▄īóų▒Įėė░Ēæ▓┘ū„┘|┴┐ĪŻėųę“─®Č╦Ą─▀\äė╩Ū╦∙ėąĻP╣Ø▀\äėĄ─Å═ļs║»öĄŻ¼ę“┤╦Ż¼╝┤╩╣├┐éĆĻP╣ØĄ─äėæBąį ─▄┐╔ąąŻ¼Č°─®Č╦Ą─äėæBąį─▄ät╬┤▒ž─▄ØMūŃę¬Ū¾ĪŻ«öäėæB─”▓┴║═▀BŚUōŽąį╠žäe’@ų°ĢrŻ¼╩╣ė├ é„ĮyĄ─╦┼Ę■┐žųŲ╝╝ągīó¤oĘ©▒ŻūCū„śIę¬Ū¾ĪŻę“┤╦Ż¼ėą▒žę¬į┌{C} ū°ś╦ŽĄųąų▒ĮėĮ©┴ó┐žųŲ ╦ŃĘ©Ż¼ęįØMūŃū„śIąį─▄ę¬Ū¾ĪŻłD5-18Š═╩Ū┐©Ą┘▓╝(O ĪżKhatib) įOėŗĄ─▓┘ū„┐šķg┴”║═╬╗ų├╗ņ║Ž┐žųŲŽĄĮyĄ─ĮYśŗłDĪŻ
łDųąŻ¼A(x)=J-TM(q)J⁻¹ ×ķÖCąĄ╩ų─®Č╦Ą─äė─▄ŠžĻćŻ╗ C(q,q)= C(q,q) ę╗JTA(x)Jq;K,K,K ╝░ K,K. ║═K ×ķ PID │Żį÷ęµī”ĮŪŠžĻćĪŻ
┤╦═ŌŻ¼▀ĆėąūĶ┴”┐žųŲ║═╦┘Č╚/┴”╗ņ║Ž┐žųŲĄ╚ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



