

╦┘Č╚é„ĖąŲ„ė├ė┌£y┴┐ŲĮęŲ║═ą²▐D▀\äėĄ─╦┘Č╚ĪŻį┌┤¾ČÓöĄŪķørŽ┬Ż¼ų╗Ž▐ė┌£y┴┐ą²▐D╦┘ Č╚Ż¼ę“×ķ£y┴┐ŲĮęŲ╦┘Č╚ąĶę¬ĘŪ│Ż╠ž╩ŌĄ─é„ĖąŲ„ĪŻ
«öė╔ļŖ╬╗ėŗ£y┴┐ŲĮęŲ╗“ą²▐DĢrŻ¼Ųõą┼╠¢─▄ē“ė╔ļŖūėŠĆ┬Ęę²│÷ĪŻĄ½╩ŪŻ¼ī”ė┌╦┘Č╚é„ĖąŲ„ üĒšfŻ¼▀@╩Ū▓╗ąąĄ─ĪŻ╬╗ęŲĄ─ī¦öĄ(╝┤╦┘Č╚)─▄ē“ė├ėŗ╦ŃÖCėŗ╦ŃŻ¼╝┤╚ĪĄ├║▄ąĪĢrķgķgĖ¶ā╚Ą─╬╗ ų├▓╔śėŻ¼į┌ĮoČ©Ģrķgā╚Ą─├}ø_öĄ┐╔ęįėŗ╦Ń│÷üĒĪŻ▀@ĘNĘĮĘ©ėąéĆā׳cŻ¼╝┤£y┴┐╦┘Č╚┐╔╣▓ė├ę╗ éĆé„ĖąŲ„(└²╚ńį÷┴┐╩Įé„ĖąŲ„),ę“Č°į┌ĮoČ©³cĖĮĮ³─▄ē“╠ß╣®┴╝║├Ą─╦┘Č╚┐žųŲĪŻ▀@ĘNŪķør▀m ė├ė┌╦∙ėąŲõ╦¹«a╔·├}ø_Ą─╦┘Č╚é„ĖąŲ„ĪŻ
╣ŌļŖĘĮĘ©╩Ūūī╣Ōšš╔õą²▐DłA▒P(«ŗėąę╗Č©║┌░ūŠĆŚl),īóŲõĘ┤╔õ╣ŌĄ─ÅŖ╚§▀Mąą├}ø_╗»╠Ä └Ēų«║¾Ż¼Öz£y│÷ą²▐DŅl┬╩║═├}ø_öĄ─┐Ż¼ęįŪ¾│÷ĮŪ╬╗ęŲŻ¼╝┤ą²▐DĮŪČ╚ĪŻ▀@ĘNą²▐DłA▒P┐╔ųŲ│╔ Ħėą┐pŽČĄ─Ż¼═©▀^ā╔éĆ╣ŌļŖČ■śO╣▄Š═─▄ē“▒µäe│÷ĮŪ╦┘Č╚ĪŻ▀@╩Ūę╗ĘN╣ŌļŖ├}ø_╩Į▐D╦┘é„ ĖąŲ„ĪŻ
Z═©ė├Ą─╦┘Č╚é„ĖąŲ„¤oę╔╩Ū£y╦┘░lļŖÖCŻ¼ų„ę¬ėąā╔ĘNŻ║ų▒┴„£y╦┘░lļŖÖC║═Į╗┴„£y╦┘░l ļŖÖCĪŻ
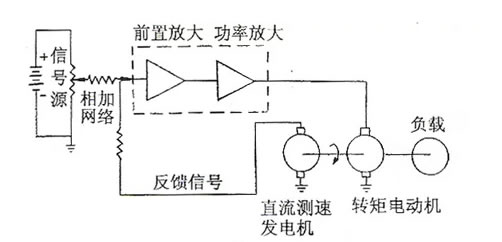
ų▒┴„£y╦┘░lļŖÖCĄ─æ¬ė├Ė³×ķŲš▒ķĪŻ╦³é„╦═ę╗éĆš²▒╚ė┌╩▄┐ž╦┘Č╚Ą─ų▒Įėą┼╠¢ĪŻ▀@ĘNé„Ėą Ų„Ą─▀xō±╩Ūė╔ŲõŠĆąįČ╚(┐╔▀_0.1%)Īó┤┼£■│╠Č╚ĪóZ┤¾┐╔ė├╦┘Č╚(▀_3000Ī½8000r/min) ęį ╝░æT┴┐ģóöĄøQČ©Ą─ĪŻ░č£y╦┘░lļŖÖCų▒ĮėĮėį┌ų„▌S╔Ž┐é╩ŪėąęµĄ─Ż¼ę“×ķ▀@śė┐╔╩╣╦³ęį┐╔─▄▀_ ĄĮĄ─ZĖ▀▐D╦┘ą²▐DĪŻ
Į╗┴„£y╦┘░lļŖÖCæ¬ė├▌^╔┘Ż¼╦³╠žäe▀mė├ė┌▀b┐žŽĄĮyĪŻ┤╦═ŌŻ¼«ö╦³┼c┐╔š{ūāē║Ų„╩Į╬╗ų├ é„ĖąŲ„▀Bė├ĢrŻ¼ų╗ę¬ė╔ŽÓ═¼Ą─Ņl┬╩┐žųŲŻ¼Š═─▄ē“░čā╔š▀Ą─▌ö│÷ą┼╠¢ĮY║ŽŲüĒĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



