

ÖCŲ„╚╦ā╚é„ĖąŲ„ęįūį╝║Ą─ū°ś╦ŽĄĮy┤_Č©Ųõ╬╗ų├ĪŻā╚é„ĖąŲ„ ę╗ ░Ńčbį┌ÖCŲ„╚╦Ą─ÖCąĄ╩ų ╔ŽŻ¼Č°▓╗╩Ū░▓čbį┌ų▄ć·ŁhŠ│ųąĪŻ
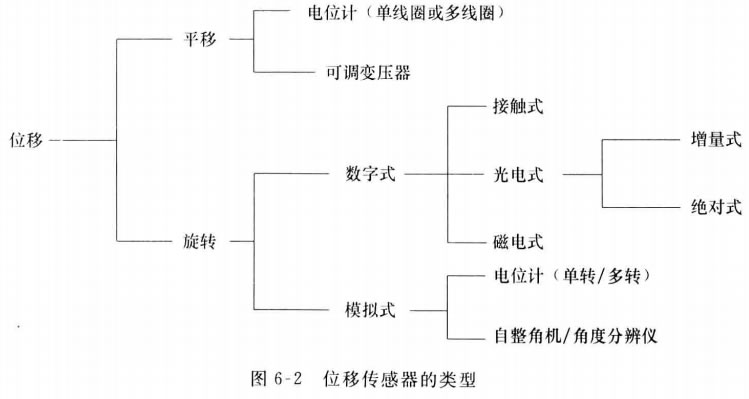
ÖCŲ„╚╦ā╚é„ĖąŲ„░³└©╬╗ęŲ╬╗ų├é„ĖąŲ„Īó╦┘Č╚║═╝ė╦┘Č╚é„ĖąŲ„Īó┴”é„ĖąŲ„ęį╝░æ¬┴”é„Ėą Ų„Ą╚ ĪŻ
╬╗ęŲé„ĖąŲ„ĘNŅÉĘ▒ČÓŻ¼▀@└’ų╗ĮķĮB ę╗ ą®│Żė├Ą─ĪŻłD6 - 2┴ą│÷¼FėąĄ─Ė„ĘN╬╗ęŲé„ĖąŲ„ĪŻ
╬╗ęŲé„ĖąŲ„ę¬Öz£yĄ─╬╗ęŲ┐╔×ķų▒ŠĆęŲäėŻ¼ę▓┐╔×ķĮŪ▐DäėĪŻ
1. ų▒ŠĆęŲäėé„ĖąŲ„
ų▒ŠĆęŲäėé„ĖąŲ„ėąļŖ╬╗ėŗ╩Įé„ĖąŲ„║═┐╔š{ūāē║Ų„ā╔ĘNĪŻ
(1)ļŖ╬╗ėŗ╩Įé„ĖąŲ„
Z│ŻęŖĄ─╬╗ęŲé„ĖąŲ„╩Ūų▒ŠĆ╩ĮļŖ╬╗ėŗŻ¼╦³ėąā╔ĘN▓╗═¼ŅÉą═Ż¼ ę╗ ×ķ└@ŠĆ╩ĮļŖ╬╗ėŗŻ¼┴Ē ę╗ ×ķ╦▄┴Ž─żļŖ╬╗ėŗĪŻ ļŖ╬╗ėŗĄ─ū„ė├įŁ└Ē╩«Ęų║åå╬ĪŻ«öžō▌dļŖūĶ×ķ¤oĖF┤¾ĢrŻ¼ļŖ╬╗ėŗĄ─▌ö│÷ļŖē║u₂ ┼c ļŖ ╬╗ ėŗā╔Č╬Ą─ļŖūĶ│╔▒╚└²Ż¼╝┤
u2 = (R2 /R1+R2 )U
╩Į ųą Ż¼U ×ķļŖį┤ļŖē║Ż╗ R₂ ×ķļŖ╬╗ėŗ╗¼ēKų┴ĮK³cķgĄ─ļŖūĶųĄŻ╗ R₁+R₂ ×ķļŖ╬╗ėŗ┐éļŖūĶųĄĪŻ
(2)┐╔š{ūāē║Ų„
┐╔š{ūāē║Ų„ė╔ā╔éĆ╣╠Č©ŠĆ╚”║═ę╗éĆ╗ŅäėĶFąŠĮM│╔ĪŻįōĶFąŠ▌S┼c▒╗£y┴┐Ą─ęŲäė╬’¾wÖCąĄ Ąž▀BĮėŻ¼▓óų├ė┌ā╔ŠĆ╚”ā╚ĪŻ«öĶFąŠļS╬’¾węŲäėĢrŻ¼ā╔ŠĆ╚”ķgĄ─±Ņ║ŽŪķør░l╔·ūā╗»ĪŻ╚ń╣¹įŁ ŠĆ╚”ė╔Į╗┴„ļŖį┤╣®ļŖŻ¼─Ū├┤Ė▒ŠĆ╚”ā╔Č╦īóÖz£y│÷═¼Ņl┬╩Į╗┴„ļŖē║Ż¼ŲõĘ∙ųĄ┤¾ąĪė╔╗ŅäėĶFąŠ ╬╗ų├øQČ©ĪŻ▀@éĆ▀^│╠ĘQ×ķš{ųŲĪŻæ¬ė├▀@ĘNūāē║Ų„ĢrŻ¼ąĶę¬═©▀^ļŖūėčbų├▀MąąĘ┤š{ųŲĪŻįōļŖ ūėčbų├ę╗░Ń░▓čbį┌é„ĖąŲ„ā╚ĪŻ
2. ĮŪ╬╗ęŲé„ĖąŲ„
ĮŪ╬╗ęŲé„ĖąŲ„ėąļŖ╬╗ėŗ╩ĮĪó┐╔š{ūāē║Ų„╝░╣ŌļŖŠÄ┤aŲ„╚²ĘNĪŻ
(1)ļŖ╬╗ėŗ╩Įé„ĖąŲ„
Z│ŻęŖĄ─ĮŪ╬╗ęŲé„ĖąŲ„╩Ūą²▐DļŖ╬╗ėŗŻ¼Ųõū„ė├įŁ└Ē┼cų▒ŠĆ╩ĮļŖ╬╗ėŗę╗śėŻ¼ŪęŠ▀ėą║▄Ė▀ Ą─ŠĆąįČ╚ĪŻ
▀@ĘNļŖ╬╗Ų„Š▀ėąę╗Č©Ą─▐DöĄĪŻ«öī”ĮŪŽÓī”ĄžįOų├ā╔╗¼äėĮė³cĢrŻ¼─▄║▄║├Ąž▒Ż│ų┤╦ļŖ╬╗ ėŗÖCąĄ╔ŽĄ─▀B└mąįĪŻā╔╗¼³cķgĄ─▌ö│÷ļŖē║×ķĘŪŠĆąįŻ¼ŲõöĄųĄ╩Ūęčų¬Ą─
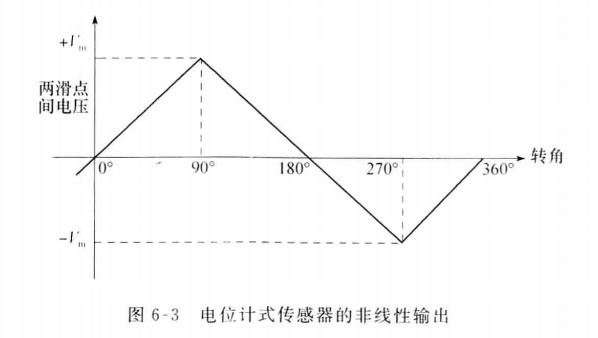
▀@ĘNļŖ╬╗ėŗ┐╔Ęų×ķÄūīėčb┼õŻ¼Ė„īėĄ─┐žųŲ▌S╩Ū═¼▌Są─Ą─Ż¼▀@śėŠ═─▄ē“ł╠ąąÅ═ļsĄ─ ū„ė├ĪŻ ╣╠Č©┤¾ŠĆ╚” ą²▐DŠĆ╚”
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



