

į┌╔Žę╗╣Øųą╬ęéāĮķĮB┴╦╔ŅČ╚īW┴Ģ┐╔ĮŌßīąįĄ─╚²ĘNĘĮĘ©Ż║1. ļ[īėĘų╬÷Ę©Ż¼2. ├¶ĖąąįĘų╬÷Ę© 3. ┤·└Ē/╠µ┤·─Żą═Ę©ĪŻį┌▀@ę╗╣Øųą╬ęéāų„ę¬ĮķĮBĘNĘĮĘ©Ż║ļ[īėĘų╬÷Ę©ĪŻ
1. ║┌ŽõšµĄ─╩Ū║┌Žõå߯┐Ī¬Ī¬╔ŅČ╚īW┴ĢĄ─╬’┘|ĮM│╔ęĢĮŪ
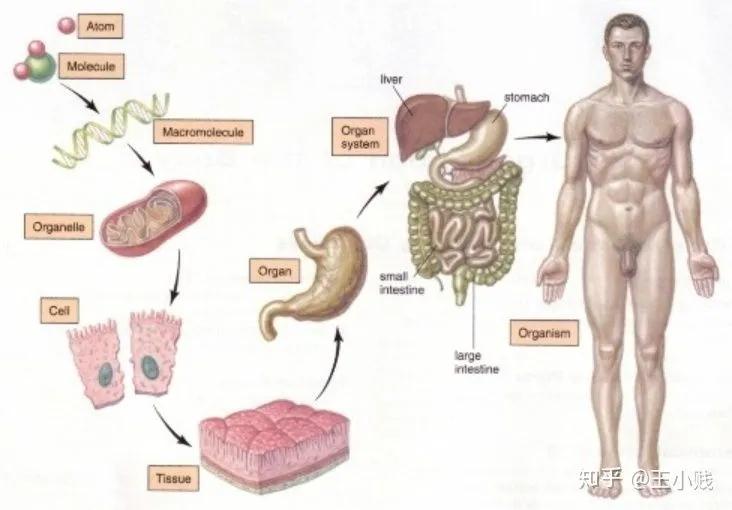
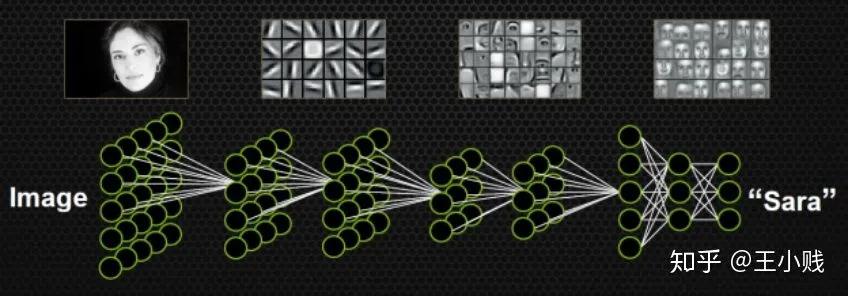
═©▀^╔Žę╗╣ØĄ─ĮķĮB╬ęéāę▓┴╦ĮŌĄĮŻ¼╔ŅČ╚īW┴ĢĄ─║┌Žõąįų„ę¬üĒį┤ė┌ŲõGČ╚ĘŪŠĆąįąį┘|Ż¼├┐éĆ╔±Įøį¬Č╝╩Ūė╔╔Žę╗īėĄ─ŠĆąįĮM║Žį┘╝ė╔Žę╗éĆĘŪŠĆąį║»öĄĄ─Ą├ĄĮŻ¼╬ęéā¤oĘ©Ž±└ĒĮŌŠĆąį╗žÜwĄ─ģóöĄ─Ūśė═©▀^ĘŪ│ŻsolidĄ─ĮyėŗīW╗∙ĄA╝┘įOüĒ└ĒĮŌ╔±ĮøŠWĮjųąĄ─ģóöĄ║¼┴x╝░Ųõųžę¬│╠Č╚Īó▓©äėĘČć·ĪŻĄ½īŹļH╔Ž╬ęéā╩Ūų¬Ą└▀@ą®ģóöĄĄ─Š▀¾wųĄęį╝░š¹éĆė¢ŠÜ▀^│╠Ą─Ż¼╦∙ęį╔±ĮøŠWĮj─Żą═▒Š╔ĒŲõīŹ▓ó▓╗╩Ūę╗éĆ║┌ŽõŻ¼Ųõ║┌Žõąįį┌ė┌╬ęéāø]▐kĘ©ė├╚╦ŅÉ┐╔ęį└ĒĮŌĄ─ĘĮ╩Į└ĒĮŌ─Żą═Ą─Š▀¾w║¼┴x║═ąą×ķŻ¼Č°╔±ĮøŠWĮjĄ─ę╗éĆĘŪ│Ż║├Ą─ąį┘|į┌ė┌╔±Įøį¬Ą─ĘųīėĮM║Žą╬╩ĮŻ¼▀@ūī╬ęéā┐╔ęįė├╬’┘|ĮM│╔Ą─ęĢĮŪüĒ└ĒĮŌ╔±ĮøŠWĮjĄ─▀\ū„ĘĮ╩ĮĪŻ▒╚╚ń╚ńŽ┬łD╦∙╩ŠŻ¼╚╦¾wĄ─ĮM│╔▀^│╠╩ŪÅ─Ęųūė-╝Ü░¹-ĮM┐Ś-Ų„╣┘-ŽĄĮy-╚╦¾wŻ║
Č°═©▀^ę╗ą®ī”╔±ĮøŠWĮjļ[īėĄ─┐╔ęĢ╗»╬ęéāę▓░l¼FŻ║▒╚╚ńŽ┬łDĄ─ę╗éĆ╚╦─śūRäeĄ─└²ūėŻ¼╔±ĮøŠWĮjį┌▀@éĆ▀^│╠ųąŽ╚īWĄĮ┴╦▀ģĮŪĄ─Ė┼─ŅŻ¼ų«║¾īWĄĮ┴╦╬Õ╣┘Ż¼║¾īWĄĮ┴╦š¹éĆ├µ▓┐Ą─╠žš„ĪŻ
╚ń╣¹╬ęéā─▄ē“ė├ę╗ą®ĘĮĘ©üĒÄ═ų·╬ęéā└ĒĮŌ▀@éĆÅ─Ą═JĖ┼─ŅĄĮGJĖ┼─ŅĄ─╔·│╔▀^│╠Ż¼─Ū├┤Š═ļx└ĒĮŌ╔±ĮøŠWĮjĄ─Š▀¾wĮYśŗŠ═Į³┴╦║▄ČÓĪŻČ°▀@ę▓┐╔ęįųØuÄ═ų·╬ęéā═Ļ│╔ę╗éĆĪ░ņŅ„╚Ī▒Ą─▀^│╠Ż¼īóš{ģóĄ──¦Ę©šµš²ūā│╔ę╗ĒŚ┐╔┐žĪó┐╔ĮŌßīĄ─▀^│╠ĪŻ
ę¬└ĒĮŌ▀@éĆĖ┼─ŅĄ─╔·│╔▀^│╠║▄ųžę¬Ą─ę╗³cŠ═╩Ūę¬čąŠ┐ļ[īėĄ─Ė┼─Ņ▒Ē╩ŠŻ¼į┌ĮėŽ┬üĒĄ─▓┐Ęųųą╬ęīóĮo┤¾╝ęĮķĮBśIĮńĻPė┌ļ[īėĘų╬÷ĘĮĘ©Ą─ÄūéĆ蹊┐╣żū„ĪŻ
2. ─Żą═īWĄĮ┴╦──ą®Ė┼─ŅŻ┐
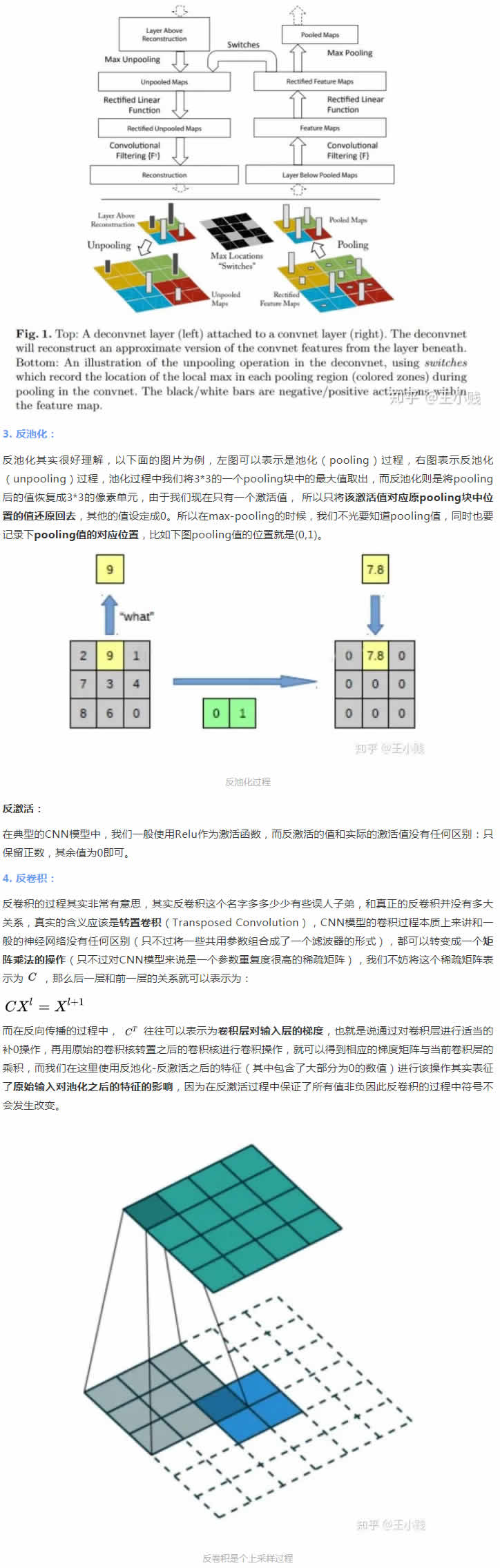
ę¬└ĒĮŌ╔±ĮøŠWĮjųą├┐īėČ╝īWĄĮ┴╦──ą®Ė┼─Ņę╗éĆĘŪ│Żų▒ė^Ą─ĘĮĘ©Š═╩Ū═©▀^ī”ļ[īė▀\ė├ę╗ą®┐╔ęĢ╗»ĘĮĘ©üĒīóŲõ▐D╗»│╔╚╦ŅÉ┐╔ęį└ĒĮŌĄ─ėąīŹļH║¼┴xĄ─łDŽ±Ż¼▀@ĘĮ├µę╗éĆĘŪ│ŻŠ▀ėą┤·▒ĒąįĄ─ę╗éĆ╣żū„Š═╩Ū14─ĻECCVĄ─ę╗Ų¬ĮøĄõų«ū„Ż║ĪČVisualizing and Understanding Convolutional NetworksĪĘŻ¼▀@Ų¬╬─š┬ų„ę¬└¹ė├┴╦Ę┤ŠĒĘeĄ─ŽÓĻP╦╝ŽļīŹ¼F┴╦╠žš„┐╔ęĢ╗»üĒÄ═ų·╬ęéā└ĒĮŌCNNĄ─├┐ę╗īėŠ┐Š╣īWĄĮ┴╦╩▓├┤¢|╬„ĪŻ╬ęéāČ╝ų¬Ą└Ąõą═Ą─CNN─Żą═Ą─ę╗éĆ═Ļš¹ŠĒĘe▀^│╠╩Ūė╔ŠĒĘe-╝ż╗Ņ-│ž╗»Ż©poolingŻ®╚²éĆ▓Į¾EĮM│╔Ą─ĪŻČ°╚ń╣¹Žļ░čę╗éĆCNNĄ─ųąķgīė▐D╗»│╔įŁ╩╝▌ö╚ļ┐šķg─žŻ┐╬ęéāŠ═ąĶę¬Įø▀^Ę┤│ž╗»-Ę┤╝ż╗Ņ-Ę┤ŠĒĘe▀@śėĄ─ę╗éĆ─µ▀^│╠ĪŻš¹éĆ─Żą═Ą─ĮYśŗ╚ńŽ┬łD╦∙╩ŠŻ║

 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



